Robot-Mig-keevitus ----Tänavalambi pulgakeevituslahendus
Indeks
1. Töötüki teave
2. Robotkeevituslahenduse ülevaade
3. Robotkeevituslahendusprotsess
4. Robotilahendus Seadmete konfiguratsioon
5. Põhifunktsioon 6. Seadmete tutvustus
7. Paigaldamine, kasutuselevõtt ja väljaõpe
8. Kontrollimine ja aktsepteerimine
9. Keskkonnanõuded
10. Garantii ja müügijärgne teenindus
11. Tarnele lisatud dokumentatsioon
Robotkeevitusrakenduse video
1, tooriku teave
-Keevitustraat Läbimõõt: Ф1,2mm
-Keevitusprotsess: gaaskaitsega keevitamine/Mig-keevitus
-Keevisõmbluse tüüp: sirgjoone tüüp, ringi tüüp
-Kaitsegaas:99% CO2
-Toimimismeetod: käsitsi peale- ja mahalaadimine, robotautomaatne keevitamine
-Paigaldamise viga:≤ 0,5 mm
-Plaadi puhastamine :keevisõmbluses on näha metallist läiget jamõlema külje keevisõmbluse kahekordse kõrguse piires
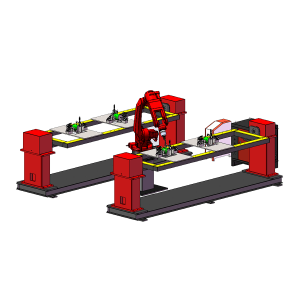
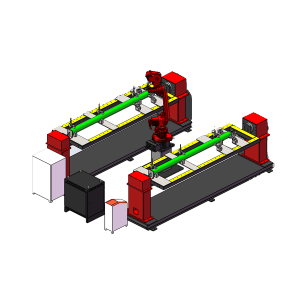
2, Robotkeevituslahendus Ülevaade
Töötõhususe parandamiseks pakub Honyeni tehas vastavalt tooriku tegelikule olukorrale keevitusroboti tööjaama komplekti, mida saab erinevate toodetega ühildumiseks asendada erinevate tööriistadega.Tööjaam koosneb robotmudelist: HY1006A-145 keevitusrobot, keevitusjõuallikas, spetsiaalne keevituspõleti robotile, elektriline juhtkapp ja nupud, vesijahutusjahuti, topelttööjaama positsioneerid, tööriistade kinnitused, ohutuskaitsepiire (valikuline) ja muu osad.
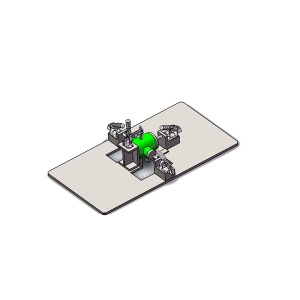
3, Mig Welding robottööjaama paigutuse tutvustus
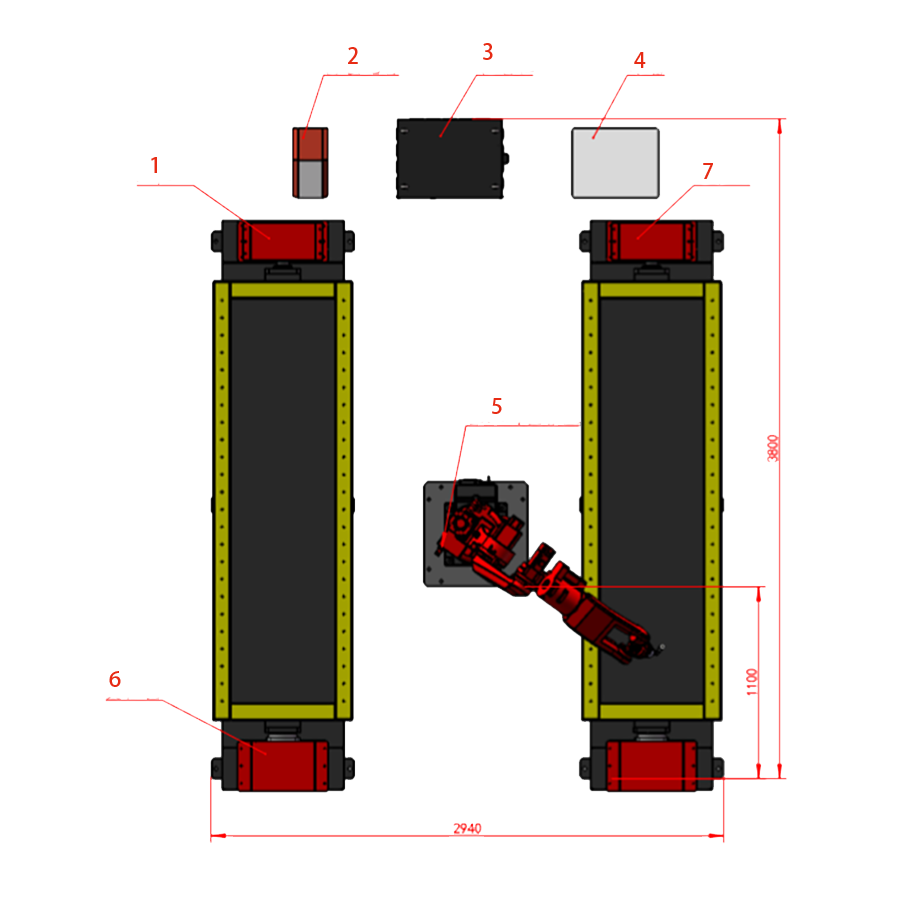
Honyeni robotkaarkeevitustööjaam Paigutus
1, tööjaam 1
2, keevitus toiteallikas
3, robotikontroller
4, vesijahutusjahuti
5, Honyeni kaarkeevitusrobot, HY1006A-145
6, positsioneerija
7, tööjaam 2
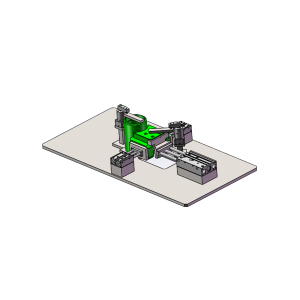
Elektripostide osade kinnitused
Elektripostide osade kinnitused 2
Robotkeevituslahendused Paigutus 1
Elektripostide osade kinnitused 3
Robotkeevituslahendused 2. paigutus
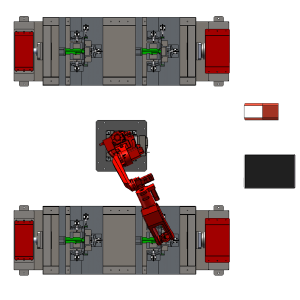
Robotkeevituslahendused Paigutus 3
4. Robotkeevituslahendusprotsess I. Operaator laadib töödeldava detaili jaamas 1, pärast laadimist ja kinnitamist.Operaator vajutab roboti reserveerimise käivitusnuppu 1 ja robot alustab automaatset keevitamist;
II.Operaator läheb tooriku laadimiseks jaama 2.Pärast tooriku laadimist vajutab operaator roboti reserveerimise käivitusnuppu 2 ja ootab, kuni robot keevitamise lõpetab;
III.Kui robot on 1. jaamas keevitamise lõpetanud, täidab see automaatselt jaama 2 programmi;
Ⅳ.Seejärel laadib operaator 1. jaamas tooriku maha ja laadib uue tooriku;
V. tsükkel järjest.
5. Robotilahendus Seadmete konfiguratsioon
| Üksus | Mudel | Kogus | Bränd | Märkused | ||
| 1 | 1.1 | Roboti keha | HY1006A-145 | 1 komplekt | Honyen | Sealhulgas roboti kere, juhtkapp, õpetav programmeerija |
| 1.2 | Roboti juhtkapp | 1 komplekt | ||||
| 1.3 | Keevitusjõu allikas | 1 komplekt | Honyen | Megmeet keevitaja | ||
| 1.4 | veepaak | 1 komplekt | Honyen | |||
| 1.5 | Vesijahutusega keevituspõleti | 1 komplekt | Honyen | |||
| 2 | 1 telje asendiregulaator | HY4030 | 2 Määra | Honyen | 2,5 m, 300 kg koormus, 1,5 kW nimiväljundvõimsus | |
| 3 | Elektriline juhtimisjaam | 2 Määra | Honyen | |||
| 4 | Süsteemi projekteerimine, integreerimine ja programmeerimine | 1 komplekt | Honyen | |||
| 5 | Turvapiire | 1 komplekt | Honyen | Valikuline | ||
6. Põhifunktsioon Keevitamise kvaliteedi ja tõhususe tagamiseks on robotsüsteem varustatud täiusliku enesekaitsefunktsiooni ja kaarkeevituse andmebaasiga.Peamised funktsioonid on järgmised:
Jätkake algset teed: kui kaitsegaasi vool on ebanormaalne, keevitustraat on kulunud ja keevitamise ajal ajutiselt peatunud, saab pärast tõrkeotsingut otse välja kutsuda käsu "jätkake keevitamine" ja robot saab automaatselt jätkata keevitamist mis tahes asendist rippasendisse.
Vigade tuvastamine ja ennustamine: pärast häire tekkimist hangib Robot juhtseadmelt andmed, spekuleerib veaosadega ja esitab kordamööda suure rikkega osade loendi, kuvab arvutis komponentide vahetamise ja diagnoosimise järjestuse, mida saab õpperipatsiga kohapeal vaadata.Lisaks saab arvuti regulaarselt robotilt tööandmeid, analüüsib saadud andmeid, hindab, kas roboti tööseisund on normaalne ja palub kasutajal eelseisva veaga tegeleda.
Kokkupõrkevastane funktsioon: kui robotkeevituspõleti põrkub kokku väliste objektidega, kaitseb roboti kokkupõrkevastane seade keevituspõleti ja roboti korpust.
Ekspertide andmebaas: seadistades programmis vajalikud keevitustingimused, suudab see süsteem automaatselt lõpule viia keevisõmbluse paigutuse ja vastavate keevitusparameetrite reguleerimise.
Õpetamine ja programmeerimine: realiseerige kohapealne programmeerimine läbi õpetamise ripatsi.
Juuste keevitamine: keevitusprotsessi ajal ei saa robot realiseerida mitte ainult tavalist pöörlevat ümmargust keevitustüüpi ja ka Z-tüüpi.See aitab robotil realiseerida kliendi pöörleva keevitusfunktsiooni vastavalt töödeldava detaili kujule, et suurendada keevisõmbluse laiust koos keevitustugevuse ja hea keevitusvõimega.
Oleku kuva: robot saab õpetamise kaudu kuvada kogu robotisüsteemi tööolekut, sealhulgas programmi töö olekut, keevitusprotsessi parameetrite muudatusi, süsteemi parameetrite muudatusi, roboti praegust asukohta, täitmisajaloo kirjeid, ohutussignaale, häirekirjeid jne, et kliendid saaksid mõista õigeaegselt robotisüsteemi olekut ja ennetada probleeme eelnevalt.
Sisend/väljundfailid: robotisüsteemi faile ja programmifaile robotsüsteemis saab salvestada SD-kaardile robotikontrolleri sees ning neid saab salvestada ka välistesse seadmetesse.Võrguühenduseta programmeerimistarkvara poolt kirjutatud programme saab laadida ka robotikontrollerisse. See aitab klientidel süsteemifaile regulaarselt varundada. Kui robotisüsteemis on probleem, saab neid varukoopiaid taastada, et lahendada roboti probleeme.
7, Seadmete tutvustus HY1006A-145 on intelligentse funktsiooniga suure jõudlusega robot.See sobib gaaskaitsega keevitamiseks ja lõikamiseks.Selle omadused on kerge kaal ja kompaktne struktuur.
Kaarkeevitusrakenduste jaoks on Honyen edukalt konstrueerinud kerge ja kompaktse õla, mis mitte ainult ei taga originaalset töökindlust, vaid tagab ka suurepärase kulutasuvuse.
Honyen kasutab kõige arenenumat servotehnoloogiat, mis võib parandada roboti liikumiskiirust ja täpsust, minimeerida operaatori sekkumist ning parandada gaasivarjestatud keevitamise ja lõikamise töötõhusust.
| Telg | Kasulik koormus | Korratavus | Võimsusvõimsus | Keskkond | Kaal | Paigaldamine |
| 6 | 10 | 0,08 | 6,5 KVA | 0–45 ℃ 20–80% RH (niiskus puudub) | 300 kg | Maa/lagi |
| Liikumisvahemik J1 | J2 | J3 | J4 | J5 | J6 | IP tase |
| ±170° | +80°~-150° | +95°~-72° | ±170° | +115°~-140° | ±220° | IP54/IP65 (randme) |
| Maksimaalne kiirus J1 | J2 | J3 | J4 | J5 | J6 | |
| 158°/s | 145°/s | 140°/s | 217°/s | 172°/s | 500°/s |
Täielik hiina keele operatsiooniliides ja selle saab muuta inglise keeleks täieliku klaviatuuriga
Toetage erinevaid side, sealhulgas I / O liides, Modbus, Ethernet jne.
Toetage ühendusi mitme roboti ja muude välisseadmetega
Suur värviline puuteekraan
Konfigureeritud kokkupõrkevastane seade, mis kaitseb roboti kätt ja vähendab häireid
Robot Motion Control tagab optimaalse tee planeerimise
Sajad sisseehitatud funktsioonikotid ja funktsioonid lihtsustavad programmeerimist
SD-kaardi kaudu on mugav andmeid varundada ja kopeerida
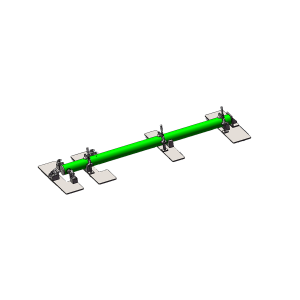
Positsioneerija

Honyen Head-tail topelttoega positsioneerija, mida kasutatakse tooriku pööramiseks, robotiga koostööks, keevitamiseks hea asendi saavutamiseks ja hea keevitustulemuse saavutamiseks
Keevitus Toiteallikas

Megmeet Ehave cm 500h / 500 / 350 seeria täisdigitaalne tööstuslik raske koormus * CO2 / MAG / MMA intelligentne keevitusseade
8. Paigaldamine, kasutuselevõtt ja väljaõpe
Enne tarnimist komplekteeritakse robotsüsteem ja testitakse täielikult funktsionaalsust meie ettevõttes.Klient toimetab oma osad meie ettevõttesse proovikeevitamiseks ja enne tarnimist eelvastuvõtmiseks.Eelvastuvõtmise ajal saavad kliendi operaatorid esmase tehnilise koolituse.
Paigaldusplaan ja tehnilised nõuded esitatakse kliendile 15 päeva enne paigaldamist ning klient peab tegema õigeaegselt ettevalmistusi vastavalt nõuetele.Meie ettevõte saadab insenerid, kes teostavad süsteemi paigaldamise ja kasutuselevõtu kasutaja saidil.Tingimusel, et tellija tagab piisava hulga toorikute kasutuselevõttu, ei tohi aeg programmeerimisest kasutuselevõtust, personali koolitusest massproovi tootmiseni ületada 10 päeva.Meie ettevõte koolitab klientidele robotisüsteemide programmeerimise, kasutamise ja hoolduse kasutajaid ning koolitatavatel peaksid olema arvuti algteadmised.
Paigaldamisel ja kasutuselevõtul peab klient varustama vajalikke tööriistu, nagu tõsteseadmed, tõstuk, trossid, lööktrell jne, ning osutama ajutist abi mahalaadimisel ja paigaldamisel.
Meie ettevõte vastutab juhendamise, paigaldamise, seadmete kasutuselevõtu ja operaatori koolitamise eest.Meie ettevõte vastutab hoolduse ja ekspluatatsioonikoolituse eest.Operaator juhib ja hooldab seadmeid ise.Koolituse sisu: seadmete ülesehituse põhimõte, levinud elektriliste tõrkeotsing, põhiliste programmeerimisjuhiste tutvustus, programmeerimisoskused ja tüüpiliste osade programmeerimismeetodid, seadmete juhtpaneeli tutvustus ja ettevaatusabinõud, seadmete tööpraktika jne.
9. Tšekk ja aktsepteerimine
Eelvastuvõtt toimub meie ettevõttes mõlema poole asjaomaste töötajate osalusel.Eelvastuvõtmise ajal testitakse toorikuid vastavalt kliendi esitatud tooriku täpsusele, keevitada tuleb ainult kvalifitseeritud toorik ja väljastatakse vastuvõtmiseelne katseprotokoll.Pärast vastuvõtmist tarnitakse Robot.Eelvastuvõtmise tagamiseks antakse tavatootmiseks 3 detaili.
10.Keskkonnanõuded Ohutusnõuded: kasutajate kasutatav gaas ja varuosad peavad vastama asjakohastele riiklikele standarditele.
Õhuallikas tuleb asetada õue, tulest vähemalt 15 m kaugusele ning gaasist ja hapnikust vähemalt 15 m kaugusele.Õhuallikas peab säilitama head ventilatsioonitingimused ja olema jahedas, tuulest eemal.
Enne roboti kasutamist tuleb kontrollida kõiki gaasiahelaid.Õhulekke korral tuleb see parandada, et viga ei oleks.
rõhu reguleerimisel ja gaasiballooni vahetamisel ei tohi operaatori kätel olla õliaineid.
õhuniiskus: üldiselt on õhuniiskus 20% ~ 75% suhteline õhuniiskus (kondensatsiooni puudumisel);Lühiajaline (1 kuu jooksul) alla 95% suhtelise õhuniiskuse (vahel ilma kondenseerumiseta).
suruõhk: 4,5–6,0 kgf / cm2 (0,45–0,6 mpa), filtriõli ja vesi, ≥ 100 l / min
Vundament: minimaalne betooni tugevus on C25 ja vundamendi minimaalne paksus 400 mm
vibratsioon: hoidke vibratsiooniallikast eemal
toiteallikas: kõigi toodetud elektri- ja elektroonikaseadmete toiteallikas on 50 Hz (± 1) ja 380 V (± 10%) kolmefaasiline vahelduvpinge, et tagada toiteallika esmane maandus.
Klientide pakutavad kohapealsed teenused:
kõik vajalikud ettevalmistused enne tarnimist, nagu vundament, vajalikud keevitustööd, abitööriistade kinnitamine jne.
mahalaadimine ja transport kliendi objektil.
11. Garantii ja müügijärgne teenindus Keevitusjõuallika garantiiaeg on 12 kuud.
Roboti kere garantiiaeg on 18 kuud.
Rikete või kahjustuste korral tavapärasel kasutamisel ja seadme garantiiaja jooksul saab meie ettevõte osi tasuta EXW parandada või asendada (v.a kulumaterjalid, hooldustooted, turvatorud, märgutuled ja muud meie ettevõtte poolt spetsiaalselt määratud kulumaterjalid).
Ilma garantiita haavatavate osade puhul lubab meie ettevõte normaalset kasutusiga ja haavatavate osade tarnehinda ning seadmetel on stabiilne seadmete tarnekanal kuni viieks aastaks.
Garantiiperioodi lõppedes jätkab meie ettevõte eluaegse tasulise teenuse osutamist ning igakülgse tehnilise toe ja vajalike tarvikute pakkumist.
12. Tarnele lisatud dokumentatsioon Paigaldusjoonised: seadmete vundamendi ehitusjoonised ja seadmete paigaldusjoonised
◆ projekteerimisjoonised: kinnitusdetailide ja seadmete joonised
◆ Käsiraamat: seadme kasutusjuhend, hooldusjuhend ja roboti kasutusjuhend
◆ tarvikud: tarneleht, sertifikaat ja garantiikaart.



