Tööstuslik tootmine on oluline lüli majandusliku ja sotsiaalse arengu edendamisel. Praegu süveneb ja konkretiseerub automaatsete keevitusseadmete uuring, mis muudab need laialdaselt kasutatavaks erinevat tüüpi keevitusstruktuuride tootmisel.
Automaatse keevitamise käigus on keevitussõlme pilu vea intelligentne ja digitaalne mõistlik juhtimine teatud määral, lähtudes ka tooriku asukoha erinevusest, tooriku vuugi hälbest ja muudest teguritest. Seetõttu mängib laserkeevitusõmbluse jälgimise tehnoloogia keevitusprotsessis olulist rolli.
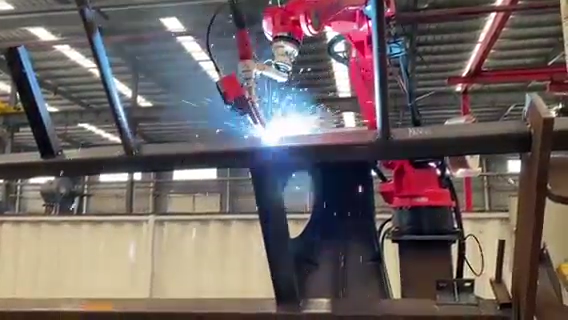
Tsemenditsisternvaguni aluse keevitamine Seitsmeteljeline Maa orbiidi kaheksateljeline pöörlemine laserkeevitusega
- Töödeldava detaili asukoht varieerub suuresti
- Töödeldava detaili ühenduses esineb kõrvalekalle
-Nõutav on kõrge keevitamise täpsus
- Halb keevituskeskkond ja suits
Sel juhul kasutatakse keevitamiseks Yooheart intelligentset robotit HY1006A-145 koos laserkeevitusõmbluse jälgimissüsteemiga, millel on suur paindlikkus, stabiilsus ja töökindlus.
Enne iga keevitamist skannib ja registreerib seade esmalt keevitusõmbluse koordinaadid keevitusõmbluse asukoha määramise teel ning seejärel arvutab sisemise algoritmi abil koordinaatide nihke ja paneb võrdluskoordinaatide parameetrid tegelikku aega, et korrigeerida tegelikku kõrvalekallet ajas, et tagada toote tihendus ja terviklikkus pärast keevitamist.
"Nelja punkti ristmiku" meetod
Nagu kõigile teada, määravad kaks punkti sirge, kuid tooriku konstruktsioon moodustab nurga. Tavapärane algoritm ei suuda selle asukohta määrata. Selleks tuleb kasutada kella nelja juures "ristumiskoha" meetodit. Kaks ristuvat joont moodustavad lõikepunkti. Spetsiaalne algoritm arvutab lõikepunkti asukoha teadaolevate nelja punkti koordinaatide abil, et saavutada keevitamise eesmärk.

Laserõmbluse jälgimissüsteem
Laserkeevitusõmbluse jälgimissüsteem koosneb peamiselt lasersensoritest ja jälgimisterminalidest. Lasersensorit kasutatakse keevitusõmbluse teabe aktiivseks hankimiseks ja reaalajas töötlemiseks ning see hoiab reaalajas sidet tööstusrobotitega. Jälgimisterminal jälgib ja konfigureerib andureid. Süsteemil on ka keevituseelse asukoha määramise, jälgimise ja skaneerimise funktsioonid, et rahuldada intelligentse keevitamise vajadusi.
Tööpõhimõte: keevisõmbluse skaneerimine, punktpilve kujutise sobitamine, algoritm tuvastab täpselt tunnuspunktid ja arvutustulemuste reaalajas andmed saadetakse robotile juhtimisjuhisteks, et muuta või juhtida roboti tööd.
Laineplaadi lahendus

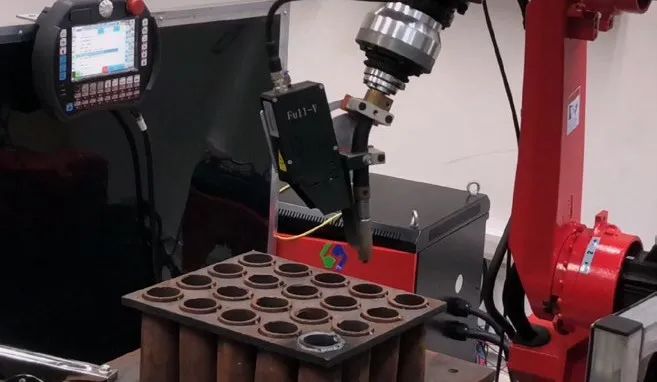
Ümarate aukude automaatne pistikute keevituslahendus

Ümmarguse õmbluse lahendus

Toruplaatide lahendused
Yunhua Intelligent pakub kiiret juurutamist, ohutuid ja tõhusaid automatiseerimislahendusi ning reaalajas süsteemilahendusi. Lasernägemisega keevitusõmbluse jälgimissüsteem võimaldab keevitusrobotil realiseerida keevitusõmbluse reaalajas asukoha ja jälgimise ning korrigeerida keevituse trajektoori vastavalt keevitusõmbluse nihkele keevitusprotsessis, et realiseerida tõeliselt intelligentne keevitamine.
Postituse aeg: 09.04.2022



